„Fahrerlose Transportsysteme“ (FTS) sind häufig genannte Antworten auf die Fragen nach Skalierungspotential, Effizienzsteigerung und Kostenreduktion in der Intralogistik. Denn, um es mit dem Werbevideo zum Döner-Schneideroboter „Der Gerät“ zu sagen: „Der Gerät wird nie müde, der Gerät schläft nie ein, der Gerät ist immer vor der Chef im Geschäft…“. Eingesetzt werden diese Systeme häufig in E-Commerce-Unternehmen, in der Automobilindustrie und zunehmend auch in anderen Feldern der industriellen Produktion. Doch die fehlende menschliche Intelligenz hinter dem Lenkrad muss durch Algorithmen abgebildet werden. Die Herausforderungen sind Dead- und Livelocks sowie die Stau- und Kollisionsvermeidung. Um das volle Potential von fahrerlosen Transportsystemen zu heben, reichen einfache Routinglösungen nicht aus. Nur mit vorausschauender Planung und intelligenter Software können hohe Verfügbarkeit, dynamische Kapazitätsanpassung sowie hoher Durchsatz ohne feste Fördertechnik tatsächlich erreicht werden.
Bestellspitzen und dynamische Lagerhaltung als Herausforderung
Gerade im E-Commerce werden durch äußere Einflüsse aber auch gezielte Marketingaktionen Bestellspitzen ausgelöst. Falls ein Distributionszentrum zusätzlich mit Clusterbildung der häufig angefragten Artikel reagiert, muss auch das Routing der Transportsysteme dynamisch auf die Situation reagieren können, da sich Ziele, Wege und damit die „Landkarte“ des Lagers verändern.
Ein kurzer Rückblick in die Entwicklung des Materialflussrechners
Vor einigen Dekaden brauchte ein Materialflussrechner (MFR) fünf bis sechs Sekunden um Lösungen zu finden und die Paletten fuhren mit durchschnittlich einem halben Meter pro Sekunde über die Förderanlage. Heute beträgt die Geschwindigkeit drei Meter pro Sekunde und die Reaktionszeit hat sich durch die Verbesserung von Rechenleistung sowie Netzwerktechnik auf 50 bis 250 Millisekunden verkürzt.
Auch der Funktionsumfang hat sich erweitert, aus reinen ‚Fahrmaschinen‘ wurden integrierte Systeme, die auch materialflussnahe Aufgaben übernehmen. Dazu gehören beispielsweise das Rückführen von Leerwannen, die Ressourcenauswahl, die Auswahl von Pack- und Arbeitsplätzen oder das Zusammenhalten von Wannenzügen. Dazu müssen die Prozesse entsprechend geplant und umgesetzt werden, damit sie reibungslos ineinandergreifen und dabei mit möglichst schlanken Anfragen untereinander kommunizieren.
Gerade vor dem Hintergrund, dass viele neuentwickelte Geräte immer intelligenter und leistungsfähiger werden, muss ein MFR auf die Unterstützung von Zukunftstechnologien ausgelegt werden.
Das Kürzeste-Pfad-Problem und Staus
{kind=link}
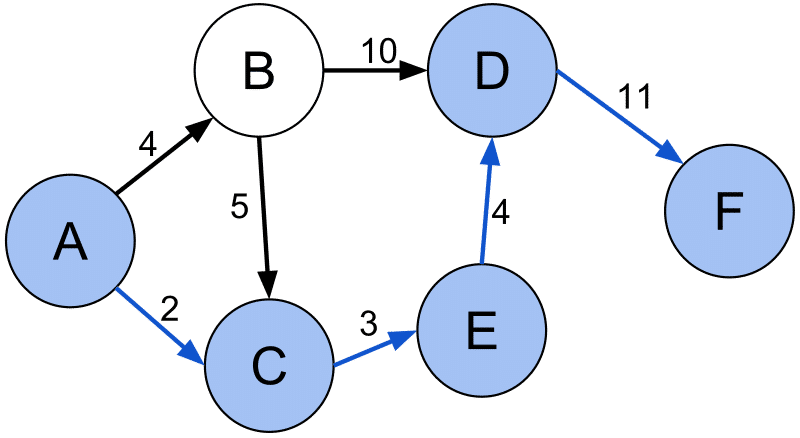
Dass der kürzeste Weg nicht der schnellste sein muss, ist jedem Teilnehmer im Straßenverkehr bewusst. Dort schlägt inzwischen entweder das Smartphone oder das GPS-System des Fahrzeugs alternative Routen vor, um Staus oder Verkehrshindernisse zu umgehen. In der Intralogistik sind die Herausforderungen ähnlich. Die in Distributionszentren und Lägern eingesetzten Lösungen können zwar das sogenannte Kürzeste-Pfad-Problem lösen, doch haben sie häufig keine Antworten auf Herausforderungen, die sich im Lagerbetrieb ergeben. Hat ein FTS Verspätung, weil es aufgehalten wurde oder länger an einem Knotenpunkt verweilt als geplant, fällt der Fahrplan in sich zusammen und stört im schlimmsten Fall noch die geplanten Routen anderer Transportmittel. Es entstehen Staus oder Deadlocks, in denen sich zwei Fahrzeuge gegenseitig blockieren.
Dynamisches Routing mit Zeitfenstern als Lösung
Beim statischen Routing wird der Pfad des FTS einmalig vorberechnet und das Gerät fährt anschließend dessen Stationen ab. Gerade in komplexen Situationen mit vielen Transportsystem oder Menschen in den Pfaden, ist dieses Vorgehen sehr fehleranfällig. Dynamisches Routing mit Zeitfenstern macht die Steuerung der Fahrzeuge flexibler, da jedes eine Reservierung an den angefahrenen Punkten braucht, um diese überhaupt anzusteuern.
Auf Basis dieser Anforderung lässt sich ein dynamisches Routing aufbauen, das je nach Art des Geräts, Aufbau der Intralogistik und der Art der Auftragsabwicklung angepasst werden kann. Um das möglich zu machen, wird über ein Online-Routing an jedem angefahrenen Ziel bis zum Endpunkt neu geroutet, wobei die Bewegungen anderer Transporteure sowie deren Reservierungen berücksichtigt werden.
Aus dem Fahren „auf Sicht“ wird ein vorausschauendes Fahren: Beispielsweise können Fahrzeuge, die einen Punkt im Augenblick nicht anfahren können, warten oder einen anderen Punkt ohne bestehende Reservierung anfragen. So lassen sich im laufenden Betrieb die Parameter des dynamischen Routings durch Simulationen und Live-Daten immer weiter anpassen, um die maximale Leistung aus der FTS-Flotte zu holen.
Online-Routing ermöglicht Parametrierung im Live-Betrieb
Mit der Ablösung von statischem Routing durch dynamische Ansätze können Wege, Routen und Ziele während der Laufzeit geändert werden. Über Dialoge werden beispielsweise Stellflächen als Blocklager in der Routenmatrix definiert, um sie direkt im Anschluss mit Transporten zu beschicken. Es ist kein softwareseitiger Eingriff mehr nötig, was die Flexibilität und Reaktionszeit auf besondere Situationen, wie bei den erwähnten Bestellspitzen, deutlich erhöht.
VDA 5050 als Antwort auf den Parallelbetrieb unterschiedlicher Systeme
Die VDA 5050 ist die Definition einer Kommunikationsschnittstelle für Fahrerlose Transportsysteme. Sie wurde in einer Kooperation des Verbands der Automobilindustrie (VDA) und des Fachverbands Fördertechnik und Intralogistik (VDMA) definiert. Die Kommunikationsschnittstelle dient dem Austausch von Status- und Auftragsdaten zwischen Fahrerlosen Transportfahrzeugen (FTF) und einer zentralen Leitsteuerung.
Die VDA 5050 ist als universell geltende Schnittstelle konzipiert, um
- neue Fahrzeuge einfach in einen bestehenden Leitstand einzubinden,
- die Integration neuer FTF in ein bestehendes FTS zu vereinfachen,
- den parallelen Betrieb von FTF verschiedener Hersteller im selben Arbeitsumfeld zu ermöglichen.
Die VDA 5050 fungiert nach dem Pull-Prinzip. Dies bedeutet, dass die beteiligten Systeme sich nicht passiv in einer „Wartehaltung“ befinden, bis sie angewiesen werden, eine Aktion auszuführen. Stattdessen muss das jeweilige System selbst (und somit aktiv) eine Verbindung zum Message-Broker herstellen, der beispielsweise Positions- und Umweltdaten an alle beteiligten Systeme makelt. Tritt ein Thema auf, dass durch das System abonniert wurde, leitet es Aktionen weiter, verarbeitet oder führt sie direkt aus. Dadurch können in einem Arbeitsumfeld unterschiedliche sowie bezüglich ihres jeweiligen Systems heterogene FTF parallel betrieben werden. Dies birgt den großen Vorteil, dass die einschränkende Festlegung auf eine einzige Marke beziehungsweise ein einziges System entfällt.
Zusammenfassung
Bei fahrerlosen Transportsystemen kommt es nicht nur auf überzeugende Hardware an, auch die Software muss ihren Teil dazu beitragen. Um das Leistungspotential vollständig umzusetzen, muss der Betrieb unterbrechungsfrei und vor allem performant sein, auch wenn viele andere Fahrzeuge und Akteure berücksichtigt werden müssen. Das ist mit der Lösung des Kürzesten-Pfad-Problems noch lange nicht abgeschlossen. Mit performantem dynamischem Routing wird sichergestellt, dass die Kosten-, Effizienz- und Skalierungsziele erreicht werden, indem Zeitfenster an Knotenpunkten sowie die Position der anderen Transportteilnehmer stets mitberücksichtigt werden. Durch den großen Erfahrungsschatz aus zahlreichen Projekten mit komplexen Materialfluss- und Routingszenarien sind wir Ihr idealer Partner, um die Potentiale selbstfahrender Systeme unterschiedlicher Hersteller effizient und sicher in Ihre Intralogistiklandschaft zu integrieren.
Dieser Beitrag erschien urpsrünglich in der Ausgabe 02/2022 der Fachmagazins Technische Logistik.